ŘÍZENÝ RELUKTANČNÍ MOTOR
Reluktanční motory jsou založeny na dlouho známé technice reluktančních krokových motorů, kdy využívají změny magnetické vodivosti v závislosti na poloze rotoru. Ačkoliv lze reluktanční krokový motor jednoduše a levně vyrobit, byl mnoho desetiletí málo využíván pro jeho nerovnoměrnost, tj. závislost točivého momentu na poloze rotoru. Tato nevýhoda může být mezitím odpovídajícím řízením vyrovnána.
Rozlišujeme dva základní typy, reluktanční motor na principu synchronního stroje s vyniklými póly a tzv. spínaný reluktanční motor, jehož základem je elektromechanický měnič. První typ je synchronní stroj bez budícího vinutí a s rotorem upraveným tak, aby se maximálně lišily magnetické vodivosti. Spínané reluktanční motory jsou charakteristické tím, že bez spolupráce s elektronickými obvody nejsou schopny funkce, na rozdíl od ostatních elektrických strojů. Podle způsobu řízení mohou pracovat v krokovém režimu, nebo v režimu kontinuálního otáčení.
Reluktanční motor je zvláštní tvar střídavého motoru. Na statoru jsou jednoduché cívky napájené napětím jedné polarity. V jeho rotoru není budicí vinutí ani kluzné kontakty. Rotor z měkkého železa má pólové nástavce ve tvaru ozubeného kola.
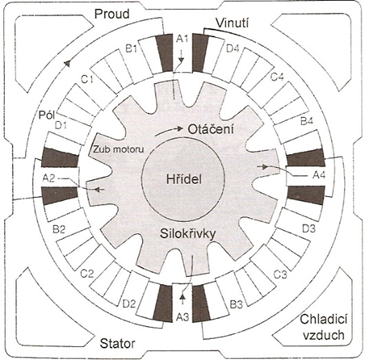
Princip spočívá v tom, že po zavedení proudu do odpovídajících cívek se rotor nastaví tak, aby magnetický obvod měl minimální magnetický odpor. Výkonovou elektronikou je možno otáčky a točivý moment reluktančního motoru velmi dobře ovlivňovat. Reluktanční motor se rozbíhá asynchronně, a pak běží synchronně.
Pojem reluktance poukazuje na magnetický odpor, který rotor v magnetickém poli představuje. Na základě bezhmotných mezer zubů v rotoru má rotor reluktančního motoru velmi malý moment setrvačnosti a tím velmi vysoké možnosti zrychlení.
Výhody reluktančních motorů:
· vysoký točivý moment při nízkých otáčkách
· vysoká účinnost
· robustní konstrukce
· malé náklady na údržbu
· stabilní chod motoru při vypadnutí jedné nebo více fází
· vysoká přetížitelnost a malý ohřev
· vysoká účinnost a výhodná cena
Nevýhody reluktančních motorů:
· točivý moment není rovnoměrný (pulzační moment)
· vyšší emise hluku
· při vysokých otáčkách vysoké nároky na řídící a výkonovou část